CONEXIOBlackBearで機械学習モデルを動かす(2) AWS Greengrassでデプロイ
▼前回の記事はこちら
「CONEXIOBlackBearで機械学習モデルを動かす(1)」
目次[非表示]
- 1.はじめに
- 2.0. 実施環境
- 3.1. CONEXIOBlackBearへのAWS IoT Greengrass Coreソフトウェアのインストール
- 4.2. プログラムをLambdaへデプロイ
- 4.1.2.1 Lambda関数作成
- 4.2.2.2 前回からのコード変更部分
- 5.3. Greengrassコンソールでの設定
- 5.1.3.1 デバイス/グループの作成
- 5.2.3.2 Greengrass_HelloWorld2関数の割り当て
- 5.3.3.3 モデルデータのアップロード
- 5.4.3.4 ローカルリソースの設定
- 5.5.3.5 USBカメラへのアクセス許可設定
- 5.6.3.6 デプロイ
- 6.4. 動作確認
- 7.まとめ
はじめに
こんにちは。コネクシオIoTブログ 技術記事担当のHです。
前回はCONEXIOBlackBearで機械学習モデルを動かしました。
今回は、前回作成したプログラムをAWS IoT Greengrassを用いて、クラウドからCONEXIOBlackBearにデプロイし、動作させてみることにします。
0. 実施環境
- CONEXIOBlackBear OSバージョン 1.1.5
- Python3.7
- tensorflow 2.0.0(keras 2.2.4)
- USB接続のWebカメラ
1. CONEXIOBlackBearへのAWS IoT Greengrass Coreソフトウェアのインストール
以前の記事において、CONEXIOBlackBearへAWS IoT Greengrass Coreソフトウェアv1.9.2をインストールしました。しかし今回は、使用するPythonバージョンの関係上、v1.11.0が必要であるため、以前の手順に従い再インストールしました。
2. プログラムをLambdaへデプロイ
プログラムのソースコードは、前回の記事を少し編集して使用しますが、基本的なロジックは全く同様で、一部のみ変更します。
2.1 Lambda関数作成
Lambdaコンソールにて、新たにGreengrass_HelloWorld2というLambda関数およびエイリアスGG_HellowWorld2を作成しました。
2.2 前回からのコード変更部分
まず、モデルの読み込み先パスを、後述の3.3.2におけるデバイス配置先設定と一致させるように変更しました。
また、whileループの内容を5秒ごとのタイマーで繰り返し実行するように置き換え、推論の結果を、AWS IoTテスト用ゲートウェイにパブリッシュするようにしました。ハンドラ関数lambda_handlerは、3.2で実行時間無制限としているため、中身は空です。
3. Greengrassコンソールでの設定
※greengrassコンソールのアップデートにより、2020/12/16時点のコンソール画面では従来からあるグループ/コア/デバイスという画面構成がClassic(v1)という括りで分割されています。本記事では、以前作成したものを再利用するため、Classic(v1)の機能を使用します。
3.1 デバイス/グループの作成
以前作成したデバイス/MyFirstGroupグループを使用するため、手順は省略します。(参考:作成手順は以前の記事の2.1)
3.2 Greengrass_HelloWorld2関数の割り当て
MyFirstGroupグループのLambda関数として、先ほど作成したGreengrass_HelloWorld2関数を参照するため、Greengrassコンソールのグループ > グループを選択 > Lambdaより、Lambdaの追加ボタンを押し、以下のように設定しました。
実行ユーザーはデフォルト、メモリは128MB、ライフサイクルは無制限としています。

3.3 モデルデータのアップロード
次に、学習済みモデルデータをGreengrassによりデバイスへデプロイするための設定を行います。
3.3.1 モデルデータのS3への配置
学習済みモデルデータをAWS上で保持するには、Amazon S3にアップロードするか、AWS SageMakerで学習したものを参照するという2通りがあります。今回はSageMakerを使用していないため、S3を利用することとします。
学習済みモデルデータは、以前の記事の1.3で出力されたkeras_cifar10_trained_model.h5を使用します。
アップロードについての注意点として、以下2つです。
- Greengrassから参照可能なファイルはzipであるため、アップロードする前にzip圧縮しておく
- 格納先バケットは以下の2つのいずれかを選択する(参考: https://docs.amazonaws.cn/en_us/greengrass/latest/developerguide/gg-dg.pdf)
- "greengrass"が含まれるバケット
- ピリオドが含まれないバケット名のバケット
- この場合、Greengrassのサービスロールでそのバケットへのアクセス権限を与える必要がある
今回は、名前に"greengrass"が含まれるバケットを作成してzipファイルを配置しました。
3.3.2 機械学習リソースの設定
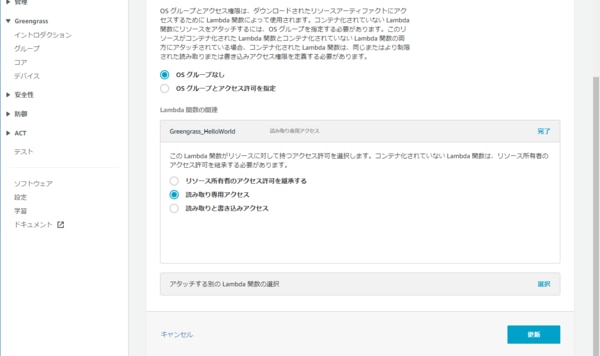
3.3.1で配置したモデルデータをLambdaから参照するため、Greengrassコンソールで機械学習リソースの作成を行います。
Greengrassコンソールのグループ > グループを選択 > リソース > Machine Learningより、機械学習リソースの追加ボタンを押し、以下のように設定しました。
モデルとして、3.3.1でアップロードしたzipファイルを選択します。ローカルパスは、先述の通り、Lambdaのソースコード上で参照されるパスと一致するようにします。アクセス権限は、モデルデータの編集は必要ないため、読み取り専用としました。

3.4 ローカルリソースの設定
Lambda関数から、CONEXIOBlackBearのUSB端子に接続したWebカメラを使用するには、Greengrassコンソールでローカルリソースを追加する必要があります。
Greengrassコンソールのグループ > グループを選択 > リソース > ローカルより、ローカルリソースの追加ボタンを押し、以下のように設定しました。
デバイスパスは、Webカメラが/dev/video2として認識されていたので、/dev/video2と入力します。Lambda関数に与えるアクセス権限は、読み取りと書き込みを設定する必要があります。

3.5 USBカメラへのアクセス許可設定
CONEXIOBlackBearにデプロイする前に、greengrass Coreソフトウェア上のLambda関数からWebカメラにアクセスできるように事前に設定が必要です。
まず、CONEXIOBlackBearのUSB端子の有効化。
Lambda関数はデフォルトでは、ggc_userユーザー/ggc_groupグループで実行されるため、/dev/video2にその他のユーザーの読み書きアクセス権限を与えます。
3.6 デプロイ
CONEXIOBlackBearで、Greengrass Core ソフトウェアのデーモンを起動します。
そして、Greengrassコンソールからデプロイします。デプロイが正常に完了したら成功です。
4. 動作確認
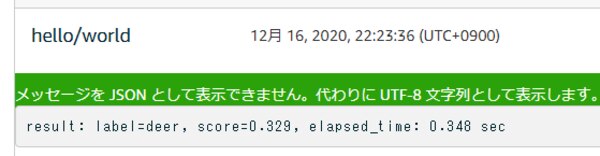
AWS IoTコンソールのテスト用デバイスゲートウェイ画面で、hello/worldトピックをサブスクライブすると、以下のようなメッセージを受信しました。CONEXIOBlackBearから推論した結果が届いています。無事、機械学習モデルで推論を行うプログラムをGreengrassでデプロイして動かすことができました。
まとめ
以上のように、機械学習モデルで推論を行うプログラムをGreengrassでデプロイして動かすことが出来ました。
今回は、PC上で学習を行った比較的時間の短い機械学習モデルを用いました。今後は、AWS のSageMakerなどクラウド上のコンピューティングリソースを使って大量の学習が必要な高度なモデルを作成し、動かしたいと思います。
▼次回
「CONEXIOBlackBearで機械学習モデルを動かす(3)」